Anonymous 1123

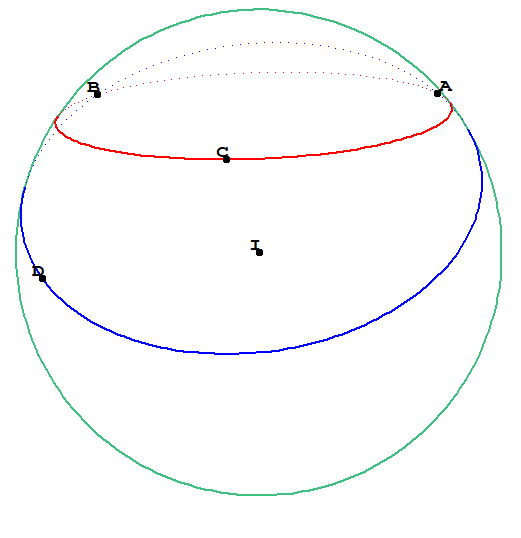
Find intersection of two circles `(ABC)` and `(ABD)` where
```
(-4, 2, 3) coordinate (A)
(1, -2, 6) coordinate (B)
(1, 5, 7) coordinate (C)
(5,2,6) coordinate (D)
```
This picture is drawn with Geosplan - Geospacw [here](http://www.aid-creem.org/)
I copied this code from comment
```
\documentclass[border=2mm,tikz]{standalone}
\usepackage{tikz-3dplot}
\usetikzlibrary{3dtools,intersections}
\begin{document}
\tdplotsetmaincoords{60}{150}
\begin{tikzpicture}[scale=1,tdplot_main_coords,line join = round,
line cap = round, declare function={R=5;}]
\path
(1,2,3) coordinate (I)
(-4, 2, 3) coordinate (A)
(1, -2, 6) coordinate (B)
(1, 5, 7) coordinate (C)
(5,2,6) coordinate (D)
;
\path[every path/.append style={name path global=c1}] pic{3d circle through 3 points={%
A={(A)},B={(B)},C={(C)},center name=H}};
\path[every path/.append style={name path global=c2}] pic{3d circle through 3 points={%
A={(A)},B={(B)},C={(D)},center name= K}};
%\path [name intersections={of=c1 and c2}];
\begin{scope}[shift={(I)}]
\draw[tdplot_screen_coords] (I) circle[radius=R];
\end{scope}
\path[name intersections={of=c1 and c2,total=\t}]
%\pgfextra{\typeout{\t}}
foreach \X in {1,...,\t}
{(intersection-\X) node[circle,draw,inner sep=1ex,label=above:$\X$]{}};
\path foreach \p/\g in {I/0,A/90,B/90,C/90,D/90}
{ (\p) node[circle,fill,inner sep=1pt,label=\g:{{$\p$}}]{}};
\end{tikzpicture}
\end{document}
```
I got incorrect result
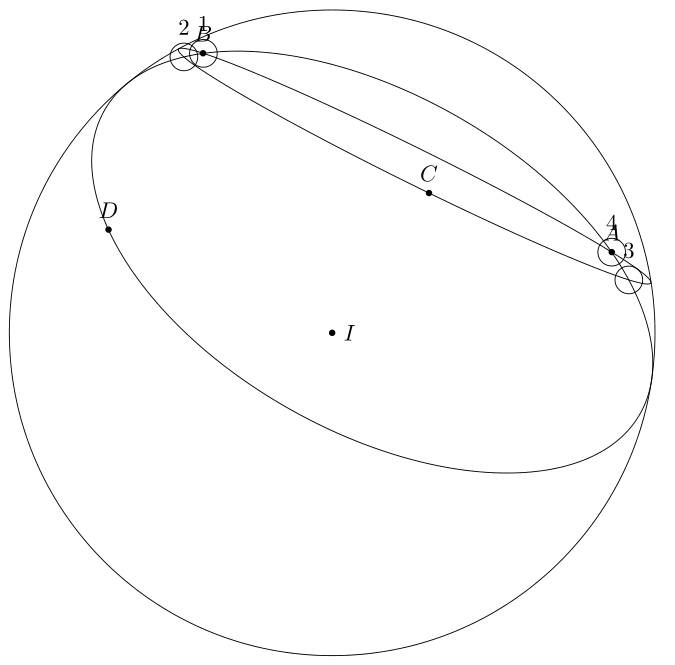
How can I correct it?